OpenCV轮廓检测:从基础到实战,玩转图像轮廓分析
在计算机视觉领域,轮廓检测是一项核心且基础的技术,它能帮助我们从图像中提取目标的形状、位置等关键信息,广泛应用于物体识别、尺寸测量、图像分割等场景。本文将基于OpenCV库,从轮廓检测的原理入手,结合实战代码,全面讲解轮廓检测、轮廓特征分析、轮廓近似及外接图形绘制等核心知识点。
一、轮廓检测的基础认知
1.1 什么是轮廓?
轮廓是图像中连续的、具有相同颜色或灰度的点组成的曲线,它代表了物体的边界。需要注意的是,轮廓与边缘不同:边缘是离散的像素点,而轮廓是连续的、有序的点集,且轮廓检测通常基于二值图像进行(像素值仅为0或255)。
1.2 OpenCV轮廓检测核心API
OpenCV中通过cv2.findContours()函数实现轮廓检测,其完整语法如下:
image, contours, hierarchy = cv2.findContours(img, mode, method)
关键参数解析:
• img:输入图像,必须是二值图像(提前通过阈值处理等方式得到);
• mode:轮廓检索模式,常用的有:
◦ cv2.RETR_EXTERNAL:仅检测最外层轮廓,忽略子轮廓;
◦ cv2.RETR_LIST:检测所有轮廓,不建立层级关系;
◦ cv2.RETR_TREE:检测所有轮廓,并建立完整的轮廓层级结构(最常用);
• method:轮廓近似方法:
◦ cv2.CHAIN_APPROX_NONE:存储轮廓所有点,数据量较大;
◦ cv2.CHAIN_APPROX_SIMPLE:压缩轮廓点,仅保留关键端点(如矩形仅保留4个角点),节省内存。
返回值说明:
• contours:包含所有轮廓的列表,每个轮廓是由边界点坐标组成的Numpy数组;
• hierarchy:轮廓的层次结构,描述轮廓间的父子、相邻关系。
注意:不同OpenCV版本返回值略有差异,通用写法为contours = cv2.findContours(…) [-2],可兼容不同版本。
二、实战:从图像中检测并绘制轮廓
2.1 前期准备:图像预处理
轮廓检测依赖二值图像,因此首先需要将彩色图像转为灰度图,再通过阈值处理得到二值图像。
import cv2
# 读取图像并转为灰度图
phone = cv2.imread('phone.png')
phone_gray = cv2.cvtColor(phone, cv2.COLOR_BGR2GRAY)
# 阈值处理得到二值图像
ret, phone_binary = cv2.threshold(phone_gray, 120, 255, cv2.THRESH_BINARY)
• cv2.threshold():将灰度图中像素值大于120的设为255(白色),小于等于120的设为0(黑色),实现图像二值化。
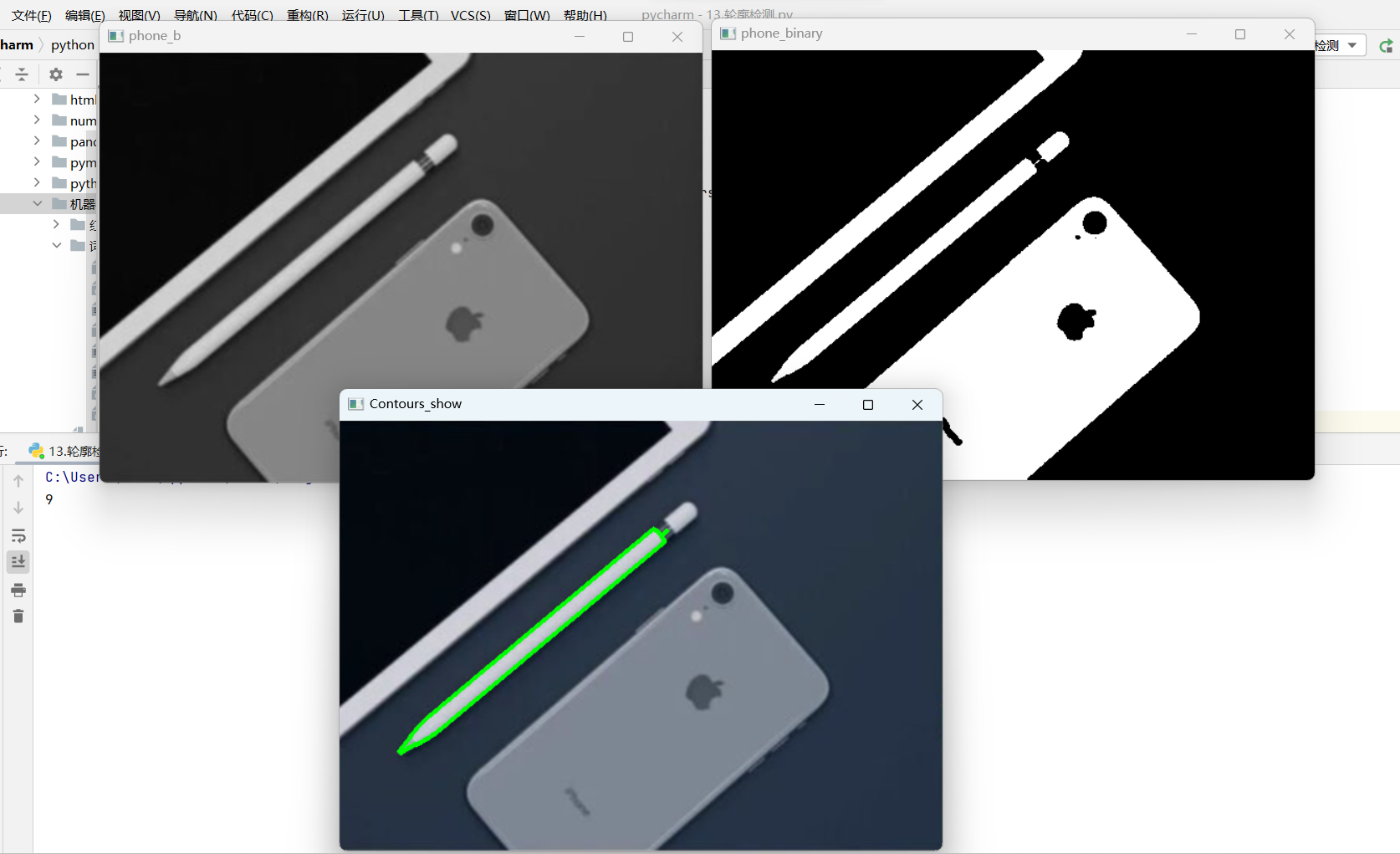
2.2 检测轮廓并绘制
# 检测轮廓(兼容不同OpenCV版本)
contours = cv2.findContours(phone_binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)[-2]
print(f"检测到的轮廓数量:{len(contours)}")
# 绘制指定轮廓(索引为6的轮廓)
image_copy = phone.copy()
image_copy = cv2.drawContours(
image=image_copy,
contours=contours,
contourIdx=6, # 绘制第6个轮廓,-1表示绘制所有轮廓
color=(0, 255, 0), # 轮廓颜色(BGR),绿色
thickness=3 # 轮廓线宽度
)
# 显示结果
cv2.imshow('Original Gray', phone_gray)
cv2.imshow('Binary Image', phone_binary)
cv2.imshow('Contours Show', image_copy)
cv2.waitKey(0) # 等待按键关闭窗口
三、轮廓特征分析:面积、周长与筛选
检测到轮廓后,我们可以提取其核心特征,实现目标轮廓的筛选。
3.1 计算轮廓面积与周长
# 计算第0个和第1个轮廓的面积
area_0 = cv2.contourArea(contours[0])
area_1 = cv2.contourArea(contours[1])
# 计算第0个轮廓的周长(closed=True表示轮廓闭合)
length_0 = cv2.arcLength(contours[0], closed=True)
print(f"第0个轮廓面积:{area_0}")
print(f"第1个轮廓面积:{area_1}")
print(f"第0个轮廓周长:{length_0}")
3.2 按面积筛选轮廓
实际场景中,我们常需要过滤掉面积过小的噪点轮廓,只保留目标轮廓:
# 筛选面积大于10000的轮廓
valid_contours = []
for cnt in contours:
if cv2.contourArea(cnt) > 10000:
valid_contours.append(cnt)
# 绘制筛选后的轮廓
image_copy = phone.copy()
image_copy = cv2.drawContours(
image=image_copy,
contours=valid_contours,
contourIdx=-1, # 绘制所有筛选后的轮廓
color=(0, 255, 0),
thickness=3
)
cv2.imshow('Contours > 10000', image_copy)
cv2.waitKey(0)

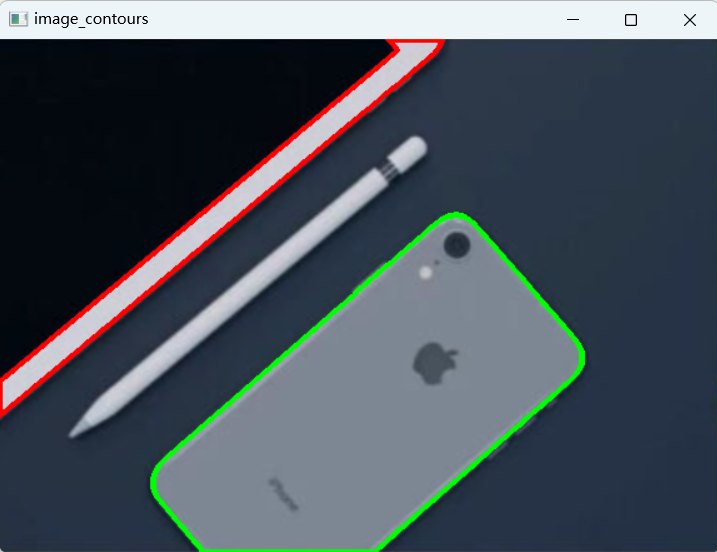
3.3 按面积排序轮廓
通过排序可以快速定位最大/次大轮廓,适用于目标主体的提取:
# 按轮廓面积降序排序,取第1个轮廓(次大轮廓)
sorted_cnt = sorted(contours, key=cv2.contourArea, reverse=True)[1]
# 绘制排序后的目标轮廓
image_contours = cv2.drawContours(
image_copy,
[sorted_cnt], # 注意:drawContours要求传入轮廓列表
contourIdx=-1,
color=(0, 0, 255), # 红色标注
thickness=3
)
cv2.imshow('image_contours', image_contours)
cv2.waitKey(0)
四、外接图形:轮廓的外接圆与外接矩形
为了更直观地定位轮廓,我们可以绘制轮廓的外接圆和最小外接矩形。
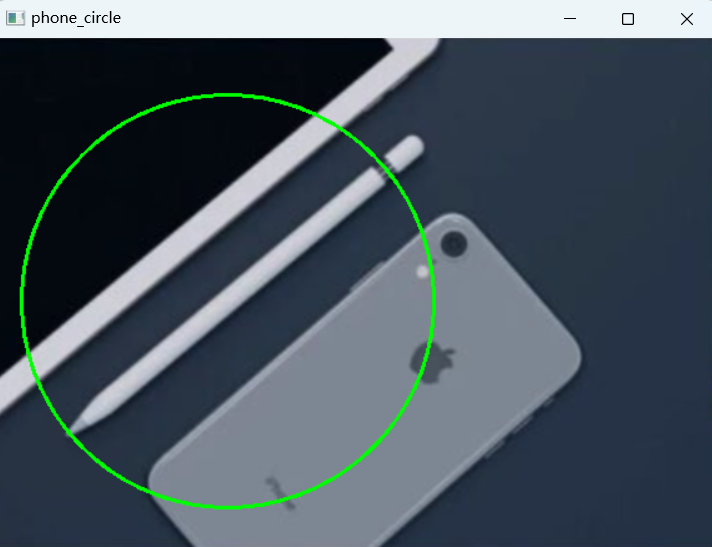
4.1 绘制轮廓外接圆
# 选取第6个轮廓
cnt = contours[6]
# 计算外接圆(返回圆心坐标(x,y)和半径r)
(x, y), r = cv2.minEnclosingCircle(cnt)
# 绘制外接圆
phone_circle = cv2.circle(
phone.copy(),
(int(x), int(y)), # 圆心坐标(需转为整数)
int(r), # 半径
(0, 255, 0), # 绿色
2 # 线宽
)
cv2.imshow('phone_circle', phone_circle)
cv2.waitKey(0)
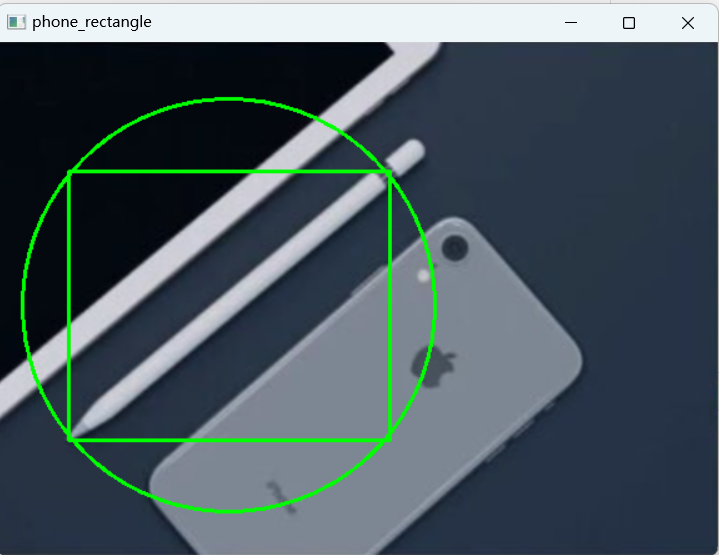
4.2 绘制轮廓最小外接矩形
# 计算最小外接矩形(返回左上角坐标(x,y)、宽w、高h)
x, y, w, h = cv2.boundingRect(cnt)
# 绘制外接矩形
phone_rectangle = cv2.rectangle(
phone.copy(),
(x, y), # 左上角
(x + w, y + h), # 右下角
(0, 255, 0),
2
)
cv2.imshow('phone_rectangle', phone_rectangle)
cv2.waitKey(0)
五、轮廓近似:简化轮廓形状
轮廓近似是通过减少轮廓点的数量,用更简洁的曲线逼近原始轮廓,核心API为cv2.approxPolyDP()。
5.1 轮廓近似原理
通过设置epsilon(近似精度,为轮廓周长的百分比),控制近似程度:epsilon越小,近似轮廓越接近原始轮廓;epsilon越大,轮廓越简化。
5.2 实战代码
# 重新读取图像并预处理
phone = cv2.imread('phone.png')
phone_gray = cv2.cvtColor(phone, cv2.COLOR_BGR2GRAY)
ret, phone_thresh = cv2.threshold(phone_gray, 120, 255, cv2.THRESH_BINARY)
# 检测轮廓
contours = cv2.findContours(phone_thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)[-2]
# 计算近似精度(轮廓周长的1%)
epsilon = 0.01 * cv2.arcLength(contours[0], True)
# 执行轮廓近似
approx = cv2.approxPolyDP(contours[0], epsilon, True)
# 打印原始轮廓与近似轮廓的点数量
print(f"原始轮廓点数量:{contours[0].shape}")
print(f"近似轮廓点数量:{approx.shape}")
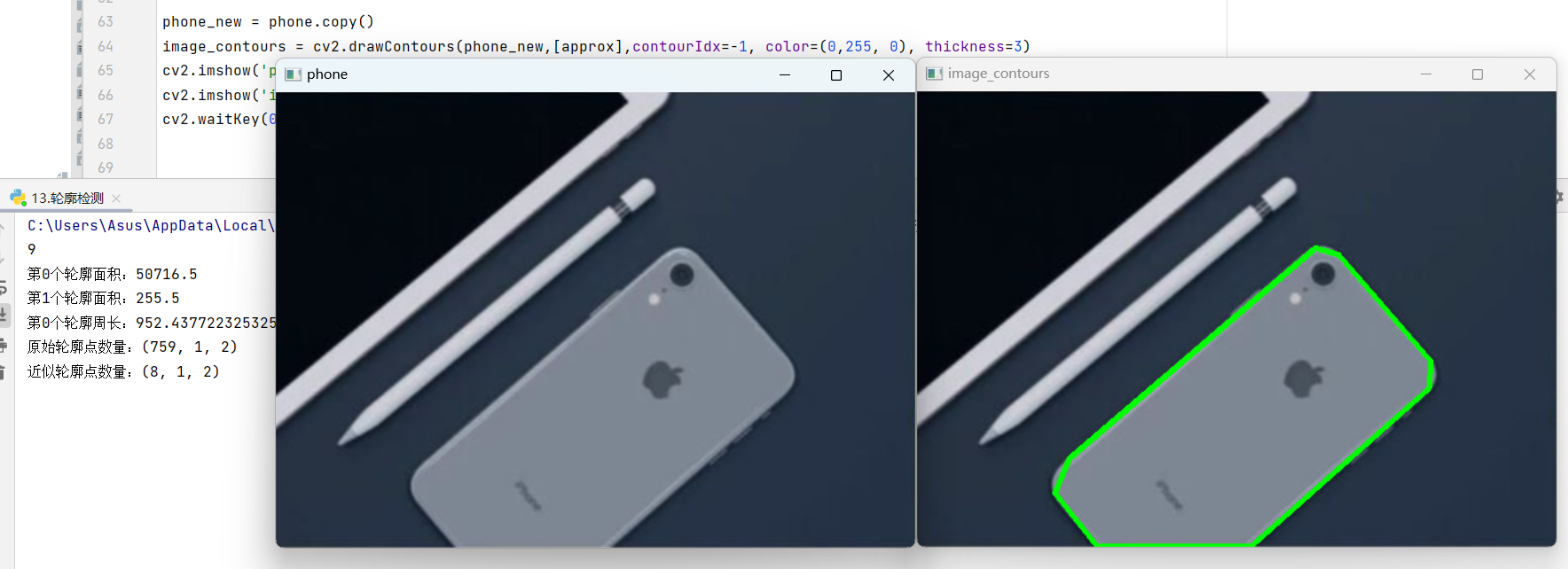
# 绘制近似轮廓
phone_new = phone.copy()
image_contours = cv2.drawContours(
phone_new,
[approx],
contourIdx=-1,
color=(0, 255, 0),
thickness=3
)
cv2.imshow('phone', phone)
cv2.imshow('image_contours', image_contours)
cv2.waitKey(0)
# 释放窗口资源
cv2.destroyAllWindows()
六、总结与应用场景
本文从轮廓检测的基础入手,讲解了OpenCV中轮廓检测、绘制、特征分析、外接图形及轮廓近似的核心用法。轮廓检测的核心流程可总结为:
图像读取 → 灰度转换 → 二值化 → 轮廓检测 → 轮廓分析/绘制/筛选。
典型应用场景:
1. 物体识别:通过轮廓特征(面积、形状、近似轮廓)匹配目标物体;
2. 尺寸测量:基于外接矩形/圆计算物体的长宽、直径等尺寸;
3. 图像分割:提取目标轮廓,分离前景与背景;
4. 缺陷检测:对比标准轮廓与实际轮廓,识别产品表面的缺陷。
掌握轮廓检测技术,能为计算机视觉项目打下坚实基础。在实际开发中,可根据场景调整阈值、近似精度、轮廓检索模式等参数,以达到最优的检测效果。
© 版权声明
文章版权归作者所有,未经允许请勿转载。


