Zephyr 架构详解:从一张分层图到源码级理解(保姆级 + 对比 FreeRTOS
CSDN 发布信息(发文时填)
分类专栏:Zephyr 内核从入门到精通
标签:Zephyr RTOS 嵌入式 物联网 Devicetree Kconfig FreeRTOS 单片机
Zephyr 架构详解:从一张分层图到源码级理解(保姆级 + 对比 FreeRTOS)
本文是「Zephyr 内核从入门到精通」系列第 02 篇。上一篇讲了选型(为什么用了 FreeRTOS 还要学 Zephyr),这一篇把 Zephyr 的整体架构讲透——不仅讲"是什么",更讲"为什么这么设计"“底层怎么落地”“读源码从哪看”。
目录
- 一、为什么"架构"是 Zephyr 最该先啃的硬骨头
- 二、分层架构:四层的职责边界
- 三、解耦哲学:Devicetree / Kconfig / 源码三维正交分离
- 四、构建系统:配置如何"编译期固化"成固件
- 五、设备驱动模型:Zephyr 最精妙的设计
- 六、子系统生态:为什么叫"面向产品的 OS"
- 七、源码阅读路线图
- 八、总结
一、为什么"架构"是 Zephyr 最该先啃的硬骨头
很多人学 Zephyr 是这样的:跟着教程跑通 blinky → 复制粘贴改 Devicetree → 项目能跑就行 → 遇到问题就懵。
根本原因是跳过了架构。Zephyr 和 FreeRTOS 最大的不同,不在某个 API,而在于它是一套有强烈设计主张的系统工程。不理解它的分层和解耦哲学,你写出来的代码永远是"能跑但说不清为什么能跑"。
所以这篇我们不急着写代码,先把骨架立起来,按这个路径展开:分层架构 → 解耦哲学 → 构建系统 → 驱动模型 → 子系统生态 → 源码路线图。
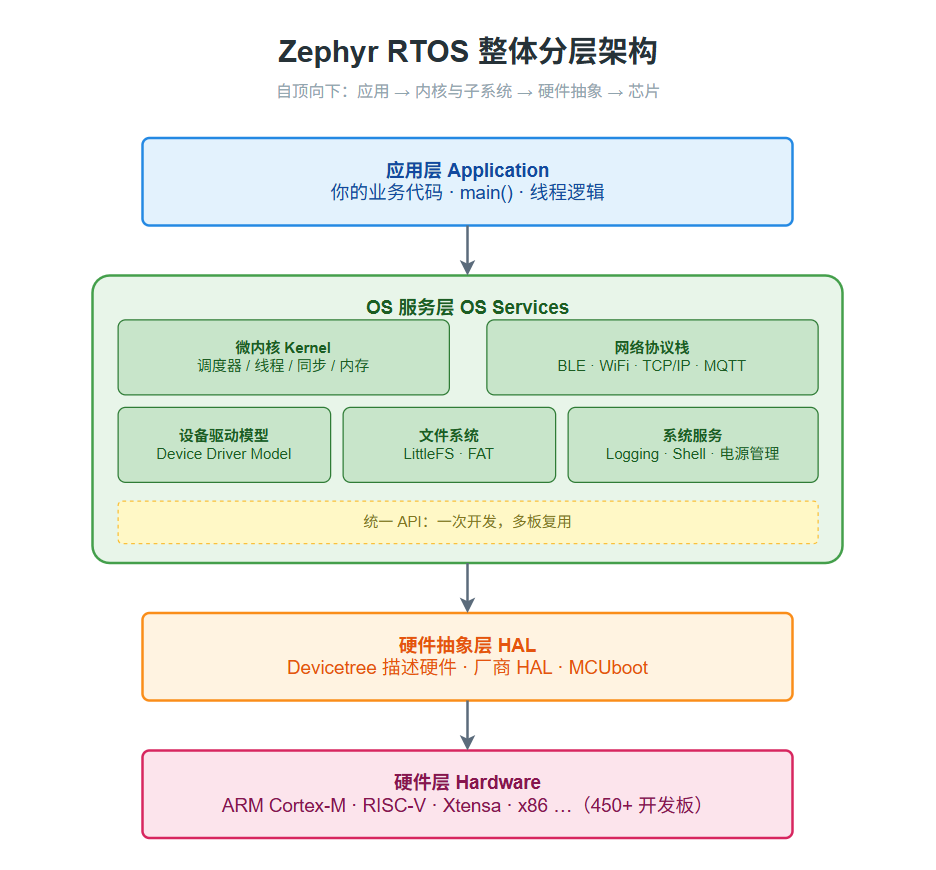
二、分层架构:四层的职责边界
Zephyr 自顶向下分四层,但真正的关键是搞清楚"每一层不该做什么"——边界比内容更重要。
2.1 应用层(Application)
你的业务代码。铁律:应用层不应该出现任何寄存器地址、引脚号、芯片型号。 它只通过 Zephyr 的公共 API 工作。
判断你的应用层写得是否"正宗",有个简单标准:把这份代码原封不动拷到另一块板子,配上对应的 Devicetree,它应该能编译通过。 如果不能,说明你把硬件细节泄漏到应用层了。
2.2 OS 服务层(OS Services)
这是 Zephyr 的主体,内部又分两块:
(a) 微内核 Kernel —— 源码主要在 kernel/ 目录:
- 调度器(
kernel/sched.c):多优先级、抢占式 + 协作式混合 - 线程管理(
kernel/thread.c):线程的创建、生命周期、栈管理 - 同步原语:信号量(
sem.c)、互斥量(mutex.c)、消息队列(msg_q.c)、管道、邮箱、条件变量 - 内存管理:堆(
k_heap)、内存槽(k_mem_slab)、内存池 - 时间管理:系统时钟、定时器、超时(
timeout.c)
(b) 子系统 Subsystems —— 源码主要在 subsys/ 和 drivers/:
网络(subsys/net)、蓝牙(subsys/bluetooth)、文件系统(subsys/fs)、日志(subsys/logging)、Shell(subsys/shell)、电源管理(subsys/pm)、Settings(subsys/settings)等等。
💡 进阶提示:Kernel 和 Subsystem 的边界,体现在它们对"实时性"的承诺不同。Kernel 的同步原语是确定性的(O(1) 调度、优先级继承的互斥量);而很多 Subsystem(如网络栈)是"尽力而为"的。做硬实时设计时,这个边界要刻在脑子里。
2.3 硬件抽象层(HAL)
包含三类东西,初学者容易混淆:
| 名称 | 作用 | 谁提供 |
|---|---|---|
| Devicetree | 描述"硬件长什么样" | Zephyr + 板厂 |
| 厂商 HAL(hal_xxx 模块) | 寄存器级操作封装 | 芯片原厂(ST、Nordic 等) |
Arch 层(arch/) |
CPU 架构相关(上下文切换、中断向量) | Zephyr |
注意:Zephyr 的"驱动"和"厂商 HAL"是两回事。Zephyr 驱动(drivers/)调用厂商 HAL 来实现统一接口。这层"夹心"设计后面第五节细讲。
2.4 硬件层(Hardware)
ARM Cortex-M/A/R、RISC-V、Xtensa、ARC、SPARC、x86……架构相关代码集中在 arch/,每个架构一个子目录。这也是为什么 Zephyr 能号称支持 450+ 开发板——架构差异被收敛在了 arch/ 这一层。
三、解耦哲学:三维正交分离
这是 Zephyr 架构的灵魂。理解了它,你就理解了 Zephyr 的一切设计取舍。
Zephyr 把一个嵌入式工程拆成三个正交(互不干扰)的维度:
硬件描述(Devicetree) —— 回答"硬件长什么样、怎么连"
功能裁剪(Kconfig) —— 回答"这次启用哪些功能"
业务逻辑(C 源码) —— 回答"程序要做什么"
3.1 对比 FreeRTOS:耦合 vs 解耦
FreeRTOS 工程里,这三件事是揉在一起的。看一段典型的 FreeRTOS 风格点灯:
/* FreeRTOS / 裸机风格:三个维度全耦合在代码里 */
#define LED_GPIO_PORT GPIOA // 硬件描述泄漏进代码
#define LED_GPIO_PIN GPIO_PIN_5 // 硬件描述泄漏进代码
void led_task(void *arg) {
__HAL_RCC_GPIOA_CLK_ENABLE(); // 寄存器级操作泄漏进业务
/* ...初始化... */
for (;;) {
HAL_GPIO_TogglePin(LED_GPIO_PORT, LED_GPIO_PIN);
vTaskDelay(pdMS_TO_TICKS(500));
}
}
换一块板子,GPIOA/PIN_5 全要改,时钟使能也要改。硬件、功能、逻辑三者死死绑在一起。
3.2 Zephyr 的写法
同样的功能,Zephyr 这样拆:
Devicetree(boards/xxx.dts 或 app.overlay)—— 描述硬件:
/ {
aliases {
led0 = &my_led;
};
leds {
compatible = "gpio-leds";
my_led: led_0 {
gpios = <&gpioa 5 GPIO_ACTIVE_HIGH>; // 引脚信息在这里
label = "User LED";
};
};
};
Kconfig(prj.conf)—— 裁剪功能:
CONFIG_GPIO=y # 启用 GPIO 子系统
CONFIG_LOG=y # 顺手开个日志
业务代码(src/main.c)—— 只写逻辑:
#include <zephyr/kernel.h>
#include <zephyr/drivers/gpio.h>
/* 从 Devicetree 拿到 led0,代码里没有任何引脚号 */
static const struct gpio_dt_spec led =
GPIO_DT_SPEC_GET(DT_ALIAS(led0), gpios);
int main(void)
{
if (!gpio_is_ready_dt(&led)) {
return -1;
}
gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
while (1) {
gpio_pin_toggle_dt(&led);
k_msleep(500);
}
return 0;
}
对比的杀伤力在哪? 这份 main.c 在 STM32、nRF52、ESP32、RISC-V 板子上完全不用改。换板子时你只需要提供一份对应的 .overlay,把 led0 这个别名指向新板子的引脚。
这就是"一次开发、多板复用"的架构级保证——不是靠程序员自觉,而是靠架构强制。
💡 深挖:
GPIO_DT_SPEC_GET是个宏,它在编译期把 Devicetree 里的引脚信息展开成一个struct gpio_dt_spec常量结构体。也就是说,运行时没有任何"解析设备树"的开销——所有解析都发生在编译期。这点和 Linux 的运行时设备树解析完全不同,是 Zephyr 针对 MCU 资源受限场景做的关键取舍。
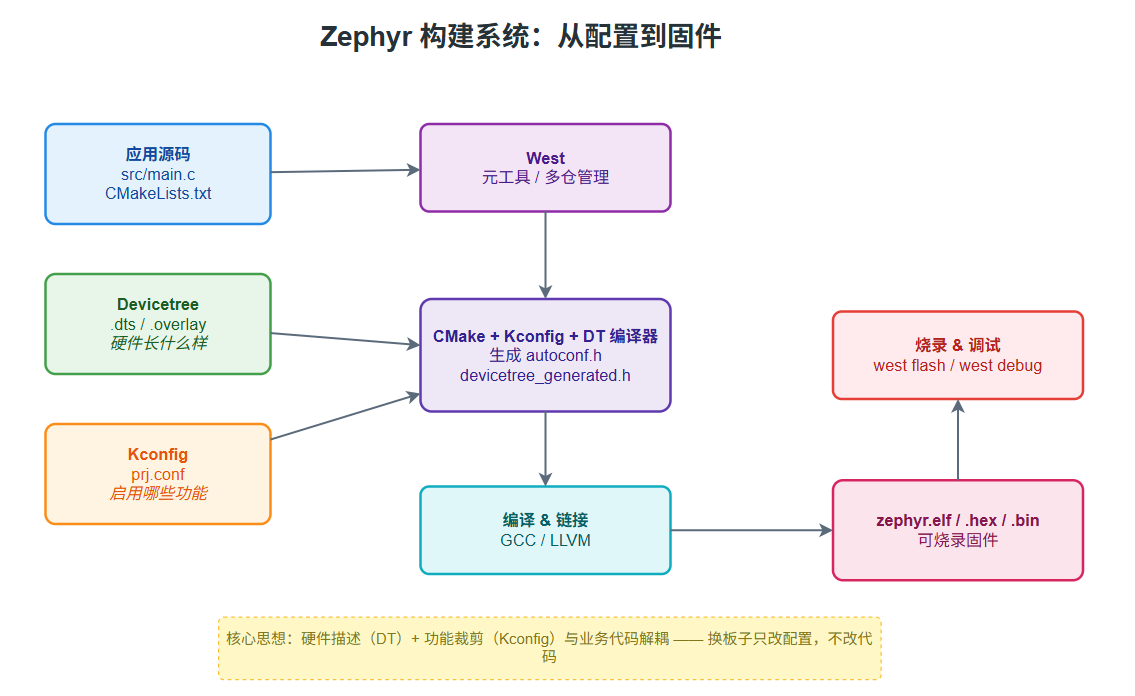
四、构建系统:配置如何"编译期固化"
理解了三维解耦,构建流程就是水到渠成的事。但魔鬼在细节里,我们逐步看。
4.1 West:元工具
west 是 Zephyr 的顶层工具,干两件事:
-
多仓库管理:Zephyr 工程不是一个 git 仓库,而是「主仓 + 一堆模块仓(HAL、协议栈、第三方库)」。
west.yml这个 manifest 文件描述了它们的版本和依赖,west update帮你拉齐。 -
命令封装:
west build/west flash/west debug底层调的是 CMake、Ninja、烧录器,west 把它们统一成一致的命令。
4.2 编译期生成:autoconf.h 和 devicetree_generated.h
这是整个构建系统最值得理解的一环:
-
Kconfig → autoconf.h:构建时,Kconfig 系统读取
prj.conf+ 各级默认值,生成build/zephyr/include/generated/autoconf.h。你写的CONFIG_GPIO=y在这里变成#define CONFIG_GPIO 1。 -
Devicetree → devicetree_generated.h:DT 编译器(gen_defines.py)把
.dts+.dtsi+.overlay合并、展开、校验后,生成一个巨大的头文件,里面是一堆DT_*宏。
关键结论:配置是编译期生效的,不是运行时。 带来两个直接好处:
-
极致裁剪:没启用的功能(
CONFIG_xxx=n)相关代码根本不会被编译进固件。这让 Zephyr 能塞进几十 KB Flash 的 MCU,同时又保留了大型 OS 的功能丰富度。 - 零运行时开销:DT 信息在编译期就成了常量,运行时不需要解析器,省 RAM 省 CPU。
4.3 完整流水线
源码 + Devicetree + Kconfig
│
▼
west(驱动 CMake)
│
▼
生成 autoconf.h / devicetree_generated.h
│
▼
GCC/LLVM 编译链接
│
▼
zephyr.elf / .hex / .bin
│
▼
west flash / west debug
💡 避坑:90% 的"我改了 prj.conf 没生效"问题,都是因为没有重新生成 CMake 缓存。改 Kconfig 或 DT 后,必要时加
-p always(pristine 全新构建):west build -p always -b <board>。记住这条能省你几个小时。
五、设备驱动模型:Zephyr 最精妙的设计
如果只让我选一个"最能体现 Zephyr 架构水平"的部分,我会选设备驱动模型。它解决的核心问题是:如何让上层代码用同一套 API 操作不同厂商、不同型号的同类外设。
5.1 三层"夹心"结构
应用代码
│ 调用统一 API:gpio_pin_set_dt() / i2c_write()
▼
设备驱动 API 层(定义 struct gpio_driver_api 函数指针表)
│ 通过函数指针表分发
▼
具体驱动实现(drivers/gpio/gpio_stm32.c / gpio_nrfx.c ...)
│ 调用
▼
厂商 HAL(hal_stm32 / hal_nordic)→ 寄存器
中间这层"驱动 API"是关键。它定义了一组函数指针表(如 struct gpio_driver_api),每个具体驱动(STM32 的、Nordic 的)都填充这张表。应用调用 gpio_pin_configure() 时,Zephyr 通过设备实例找到对应的 api 表,再分发到具体实现。
这本质上是用 C 实现了面向对象的多态——和 Linux 字符设备的 file_operations 思路异曲同工。
5.2 设备实例与 Devicetree 的绑定
每个驱动通过 DEVICE_DT_INST_DEFINE() 宏,把自己和 Devicetree 中的节点(通过 compatible 属性匹配)绑定,在编译期生成一个 struct device 实例,并放进一个可迭代的链接段(iterable section)里。系统启动时,内核按初始化级别与优先级(PRE_KERNEL_1 / PRE_KERNEL_2 / POST_KERNEL 等)依次调用这些设备的 init 函数。
💡 深挖:这套机制叫 Device Driver Model,它和 Devicetree、Kconfig 三者共同构成了 Zephyr 的"硬件抽象铁三角"。后续《Zephyr 驱动模型》《Devicetree 绑定》两篇会拆到源码级,这里先建立整体认知。
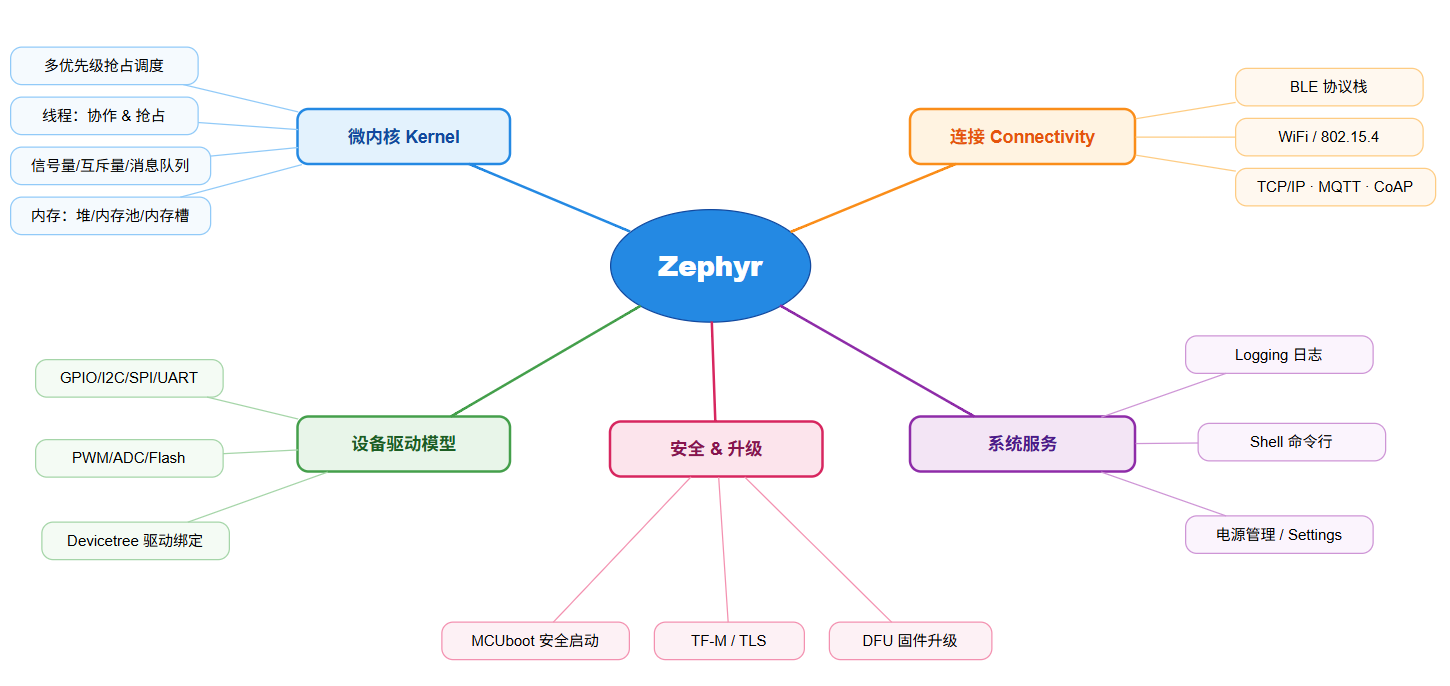
六、子系统生态:为什么叫"面向产品的 OS"
到这里你应该明白了:Zephyr 的内核其实不算它最大的卖点(论极致轻量,FreeRTOS、RT-Thread 都很能打)。它真正的护城河是开箱即用、且经过认证/测试的子系统全家桶。
举个产品化的例子——做一个「BLE + OTA 升级」的产品:
| 需求 | FreeRTOS 路线 | Zephyr 路线 |
|---|---|---|
| BLE 协议栈 | 自己集成厂商栈,处理兼容性 | 内置认证过的 BLE host,CONFIG_BT=y
|
| OTA 升级 | 自己设计升级流程、双 bank、回滚 | MCUboot + DFU 子系统,配置即用 |
| 安全启动 | 自己实现签名校验 | MCUboot 签名验证 |
| 日志/调试 | 自己写 printf 重定向 |
CONFIG_LOG=y,分级日志 + 多后端 |
| 命令行调试 | 自己写串口命令解析 |
CONFIG_SHELL=y,开箱即用 |
差距一目了然。Zephyr 把"做一个真实产品需要的非功能性需求"在架构层面就准备好了。这就是"面向产品"的含义。
当然,Zephyr 也有代价:学习曲线更陡(DT/Kconfig/West 三套要重学)、工程更"重"、中文资料偏少。务实的结论是:简单的一次性小项目 FreeRTOS 依然香;需要长期维护、多板适配、带连接和安全的产品,Zephyr 的架构优势会随项目变大越来越明显。
七、源码阅读路线图
很多人想读 Zephyr 源码但不知从哪下手。给你一条循序渐进的路线:
第一站 · 理解启动流程
-
arch/<你的架构>/core/—— 复位向量、z_arm_reset等 -
kernel/init.c——z_cstart(),内核的"main 之前",看设备初始化、内核对象初始化的顺序
第二站 · 理解 Devicetree 如何落地
- 编译一次工程,去
build/zephyr/include/generated/看devicetree_generated.h,对照你的.dts,理解宏是怎么展开的 -
include/zephyr/devicetree.h——DT_*宏的定义
第三站 · 理解设备驱动模型
-
include/zephyr/device.h——struct device、DEVICE_DT_INST_DEFINE - 挑一个简单驱动通读,推荐
drivers/gpio/gpio_<你的芯片>.c
第四站 · 理解内核调度
-
kernel/sched.c—— 调度核心(这部分留到《Zephyr 调度器》专篇深挖)
建议配合本专栏后续的《Zephyr 内核架构》《Zephyr 驱动模型》《Devicetree 绑定》三篇一起看,源码 + 讲解效率最高。
八、总结
- 四层分层:应用 / OS 服务 / HAL / 硬件,重点是理解每层的职责边界;
- 三维解耦:Devicetree(硬件)+ Kconfig(功能)+ 源码(逻辑)正交分离,是"换板不改码"的架构级保证;
- 编译期固化:配置在编译期变成 C 宏,带来极致裁剪和零运行时开销;
- 驱动模型:用 C 函数指针表实现多态,配合 Devicetree 绑定,是 Zephyr 抽象能力的核心;
- 子系统生态:内置认证过的连接/安全/升级能力,让它成为"面向产品的 OS"。
把这五点想透,你看 Zephyr 工程的眼光就和昨天不一样了。
下一篇《Zephyr 开发环境搭建》,从零安装 West + SDK,把第一个程序烧进真实硬件,并讲清每一步背后发生了什么。
📎 本文 3 张架构图(PlantUML .puml + draw.io .drawio 双格式源文件)+ 源码阅读清单已整理,关注本专栏、评论区扣「架构图」即可领取,可自行改图导出 PNG/SVG。

如果这篇帮你理清了 Zephyr 架构,点赞 + 收藏 + 关注三连支持一下,是我持续更新的最大动力。有问题欢迎评论区交流,我会逐条回复。
© 版权声明
文章版权归作者所有,未经允许请勿转载。